.jpg)
.jpg)
.jpg)
.jpg)
ʻO ka motika stepper hybrid Nema 8 (20mm), bipolar, 4-alakaʻi, wili alakaʻi ACME, walaʻau haʻahaʻa, ola lōʻihi, hana kiʻekiʻe
ʻO ka motika stepper hybrid Nema 8 (20mm), bipolar, 4-alakaʻi, wili alakaʻi ACME, walaʻau haʻahaʻa, ola lōʻihi, hana kiʻekiʻe
Loaʻa kēia motika stepper hybrid 20mm i ʻekolu ʻano: hoʻokele ʻia e waho, ma o ke axis, a me ma o ke axis paʻa. Hiki iā ʻoe ke koho e like me kāu mau pono kikoʻī.
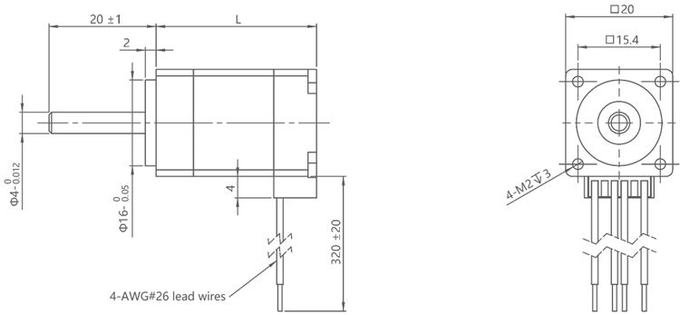
ʻO ke kaha kiʻi hoʻolālā o ka motika waho maʻamau VSM20HSM:
Nā wehewehe
| Inoa Huahana | Nā mīkini stepper hybrid i hoʻokele ʻia ma waho 20mm |
| Hoʻohālike | VSM20HSM |
| ʻAno | nā mīkini stepper hybrid |
| Ke kihi ʻanuʻu | 1.8° |
| Uila uila (V) | 2.5 / 6.3 |
| Manawa (A) | 0.5 |
| Ke kū'ē (Ohms) | 5.1 / 12.5 |
| Inductance (mH) | 1.5 / 4.5 |
| Nā Uea Alakaʻi | 4 |
| Ka Paʻa ʻana o ka Torque (Nm) | 0.02 / 0.04 |
| Ka lōʻihi o ka mīkini (mm) | 30 / 42 |
| Mahana Ambient | -20℃ ~ +50℃ |
| Piʻi ka mahana | 80K Max. |
| Ikaika Dielectric | 1mA Max. @ 500V, 1KHz, 1Kekona. |
| Ke kū'ē ʻana i ka pale ʻana | 100MΩ Min. @500Vdc |
Nā Palapala Hōʻoia

Nā Palena Uila:
| Ka nui o ka mīkini | Uila uila/ Pae (V) | I kēia manawa/ Pae (ʻA) | Ke kū'ē/ Pae (Ω) | Inductance/ Pae (mH) | Helu o Nā Uea Alakaʻi | ʻO ka Inersia Rotor (g.cm)2) | Ka Paʻa ʻana i ka Torque (Nm) | Ka lōʻihi o ka mīkini L (mm) |
| 20 | 2.5 | 0.5 | 5.1 | 1.5 | 4 | 2 | 0.02 | 30 |
| 20 | 6.3 | 0.5 | 12.5 | 4.5 | 4 | 3 | 0.04 | 42 |
Nā palena loea laulā:
| Ka ʻae ʻana o ka radial | 0.02mm Max (450g ukana) | Ke kū'ē ʻana i ka pale ʻana | 100MΩ @500VDC |
| Ka ʻae ʻana o ke axial | 0.08mm Max (450g ukana) | Ikaika dielectric | 500VAC, 1mA, 1s@1KHZ |
| Ukana radial kiʻekiʻe loa | 15N (20mm mai ka ʻili flange) | Papa hoʻokaʻawale | Papa B (80K) |
| Ka ukana axial kiʻekiʻe loa | 5N | Mahana ambient | -20℃ ~ +50℃ |
Nā kikoʻī o ka wili:
| Ke anawaena o ka wili alakaʻi (mm) | Ke alakaʻi (mm) | Kaʻanuʻu (mm) | E hoʻopau i ka ikaika laka ponoʻī (N) |
| 3.5 | 0.6096 | 0.003048 | 80 |
| 3.5 | 1 | 0.005 | 40 |
| 3.5 | 2 | 0.01 | 10 |
| 3.5 | 4 | 0.02 | 1 |
| 3.5 | 8 | 0.04 | 0 |
Piʻo alapine-torque
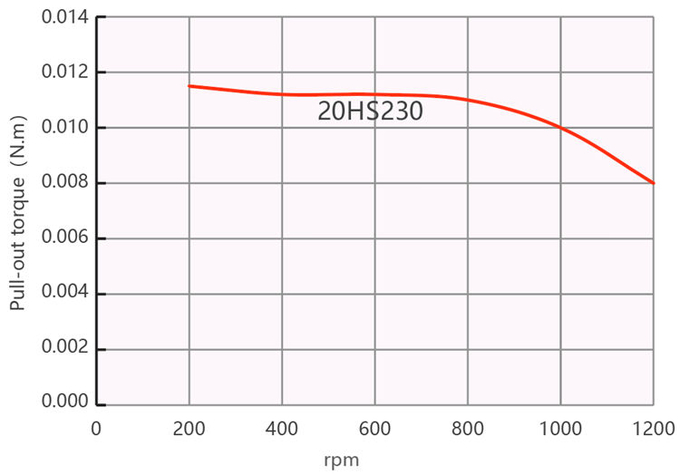
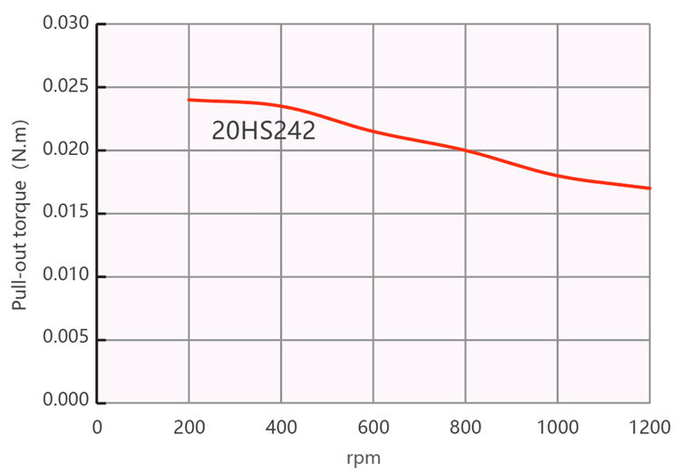
Kūlana hoʻāʻo:
ʻO ka hoʻokele chopper, ka hapalua micro-stepping, ka uila hoʻokele 24V
Nā wahi o ka noi
Paʻi 3D:Hiki ke hoʻohana ʻia nā motika stepper hybrid 20mm no ka kaohi neʻe ʻana i nā mea paʻi 3D e hoʻokele i ke poʻo paʻi, ke kahua a me ka ʻōnaehana neʻe axial.
Nā lako hana automation: Hoʻohana pinepine ʻia kēia mau mīkini stepper i nā lako hana automation, e like me nā mīkini hoʻopili aunoa, nā laina hōʻuluʻulu aunoa, ka lawelawe ʻana i nā lima robotic, a me nā mea ʻē aʻe, no ka kaohi ʻana i ke kūlana pololei a me ka wikiwiki.
Nā Lopako:Ma ke kahua o ka robotics, hoʻohana ʻia nā motika stepper hybrid 20 mm e kāohi i nā neʻe hui o nā robots no ka kaohi pololei o ke ʻano a me ke kūlana.
Nā mea hana mīkini CNC:Hoʻohana ʻia kēia mau motika stepper i nā mea hana mīkini CNC e hoʻokele i nā neʻe pololei o nā mea hana a i ʻole nā papa no ka mīkini kikoʻī kiʻekiʻe.
Nā lako lapaʻau:I nā lako lapaʻau, hiki ke hoʻohana ʻia nā motika stepper hybrid 20mm e kaohi pololei i ka neʻe ʻana o nā ʻāpana i nā lako lapaʻau, e like me nā robots ʻokiʻoki a me nā ʻōnaehana lawe lāʻau.
Nā lako kaʻa:I ka ʻoihana kaʻa, hiki ke hoʻohana ʻia kēia mau motika stepper e kāohi i ke kūlana a me ka neʻe ʻana o nā ʻāpana kaʻa, e like me nā ʻōnaehana hāpai a hoʻohaʻahaʻa i ka puka makani, nā ʻōnaehana hoʻoponopono noho, a pēlā aku.
Hale Akamai:Ma ke kahua home akamai, hiki ke hoʻohana ʻia nā motika stepper hybrid 20mm e kāohi i ka wehe ʻana a me ka pani ʻana o nā pale, nā kāmela e hoʻohuli ana i nā ʻōnaehana palekana home, a pēlā aku.
ʻO kēia wale nō kekahi o nā wahi hoʻohana maʻamau o nā mīkini stepper hybrid 20mm, ʻo ka ʻoiaʻiʻo, he ākea nā noi o nā mīkini stepper ma nā ʻoihana a me nā kahua like ʻole. Pili pū nā hiʻohiʻona hoʻohana kikoʻī i kā lākou kikoʻī kikoʻī, ka hana a me nā koi kaohi.
Pōmaikaʻi
Ka Pololei a me ke Kūlana Kūlana:Hāʻawi nā motika stepper hybrid i ka pololei kiʻekiʻe a me ka hiki ke hoʻonoho no nā neʻe ʻanuʻu maikaʻi, pinepine me nā kihi ʻanuʻu haʻahaʻa e like me 1.8 degere a i ʻole 0.9 degere, e hopena ana i ka kaohi kūlana pololei.
ʻO ka torque kiʻekiʻe a me ka wikiwiki kiʻekiʻe:Ua hoʻolālā ʻia nā motika stepper hybrid e hāʻawi i ka hopena torque kiʻekiʻe a, me ka mea hoʻokele a me ka mea hoʻokele kūpono, ka wikiwiki kiʻekiʻe. ʻO kēia ka mea e kūpono ai lākou no nā noi e pono ai ka torque kiʻekiʻe a me ka neʻe wikiwiki kiʻekiʻe.
Ka Mana Hoʻokele a me ka Polokalamu:He ʻōnaehana hoʻokele loop hāmama nā motika stepper hybrid me ka hiki ke hoʻokele maikaʻi. Hiki ke hoʻokele pololei ʻia lākou i kēlā me kēia ʻanuʻu o ka neʻe e ka mea hoʻokele, e hopena ana i nā kaʻina neʻe hiki ke hoʻonohonoho pono ʻia a hiki ke hoʻokele ʻia.
Ka Hoʻokele a me ka Mana Maʻalahi:He maʻalahi loa nā kaapuni hoʻokele a me ka hoʻokele o nā motika stepper hybrid i hoʻohālikelike ʻia me nā ʻano motika ʻē aʻe. ʻAʻole pono lākou i ka hoʻohana ʻana i nā mea hoʻihoʻi kūlana (e laʻa me nā encoders) a hiki ke hoʻokele pololei ʻia e nā mea hoʻokele a me nā mea hoʻokele kūpono. Hoʻomaʻalahi kēia i ka hoʻolālā ʻōnaehana a me ke kau ʻana a hoʻemi i nā kumukūʻai.
Hilinaʻi kiʻekiʻe a me ke kūpaʻa:Hāʻawi nā motika stepper hybrid i ka hilinaʻi kiʻekiʻe a me ke kūpaʻa ma muli o ko lākou kūkulu maʻalahi, ka helu liʻiliʻi o nā ʻāpana neʻe a me ka hoʻolālā brushless. ʻAʻole pono lākou i ka mālama mau, he ola lawelawe lōʻihi, a hāʻawi i ka hana paʻa me ka hoʻohana pono a me ka hana.
Hoʻohana pono i ka ikehu a me ka walaʻau haʻahaʻa:He mālama pono ka ikehu o nā motika stepper hybrid, e hāʻawi ana i ka torque hoʻopuka kiʻekiʻe ma ka mana haʻahaʻa. Eia kekahi, hana pinepine lākou e hana i nā pae walaʻau haʻahaʻa, e hāʻawi ana iā lākou i kahi pono i nā noi pili i ka walaʻau.
Nā Koina Koho ʻana o ka Motika:
►ʻAoʻao neʻe/kau ʻana
►Nā Koina Hoʻouka
►Nā Koina Hahau
►Nā koi mīkini hoʻopau
►Nā Koi Pololei
►Nā Koina Manaʻo no ka Encoder
►Nā Koina Hoʻoponopono Lima
►Nā Koina Kaiapuni
Hale hana hana



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)