





ʻO ka mīkini stepper wili pōpō hybrid Nema 23 (57mm) 1.8° Step Angle 4 Lead Wires no nā lako diagnostic lapaʻau
ʻO ka mīkini stepper wili pōpō hybrid Nema 23 (57mm) 1.8° Step Angle 4 Lead Wires no nā lako diagnostic lapaʻau
ʻO ka motika stepper hybrid Nema 23 (57mm), bipolar, 4-lead, wili pōpō, walaʻau haʻahaʻa, ola lōʻihi, hana kiʻekiʻe, hōʻoia ʻia ʻo CE a me RoHS.
Ka nui o ka ukana, ka haʻalulu liʻiliʻi, ka walaʻau haʻahaʻa, ka wikiwiki wikiwiki, ka pane wikiwiki, ka hana maʻalahi, ke ola lōʻihi, ka pololei o ke kūlana kiʻekiʻe (a hiki i ka ± 0.005mm)
Wehewehena
| Inoa Huahana | Motika stepper wili pōpō hybrid 57mm |
| Hoʻohālike | VSM57BSHSM |
| ʻAno | nā mīkini stepper hybrid |
| Ke kihi ʻanuʻu | 1.8° |
| Uila uila (V) | 2.3 / 3 / 3.1 / 3.8 |
| Manawa (A) | 3/4 |
| Ke kū'ē (Ohms) | 0.75 / 1 / 0.78 / 0.95 |
| Inductance (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| Nā Uea Alakaʻi | 4 |
| Ka lōʻihi o ka mīkini (mm) | 45 / 55 / 65 / 75 |
| Mahana Ambient | -20℃ ~ +50℃ |
| Piʻi ka mahana | 80K Max. |
| Ikaika Dielectric | 1mA Max. @ 500V, 1KHz, 1Kekona. |
| Ke kū'ē ʻana i ka pale ʻana | 100MΩ Min. @500Vdc |
Nā Palapala Hōʻoia

Nā Palena Uila:
| Ka nui o ka mīkini | Uila uila /Pae (V) | I kēia manawa /Pae (ʻA) | Ke kū'ē /Pae (Ω) | Inductance /Pae (mH) | Helu o Nā Uea Alakaʻi | ʻO ka Inersia Rotor (g.cm)2) | Kaumaha o ke kaʻa (g) | Ka lōʻihi o ka mīkini L (mm) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
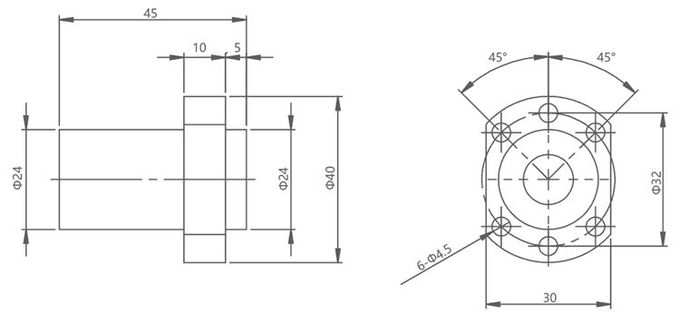
ʻO ke kaha kiʻi hoʻolālā o ka motika waho maʻamau VSM57BSHSM:
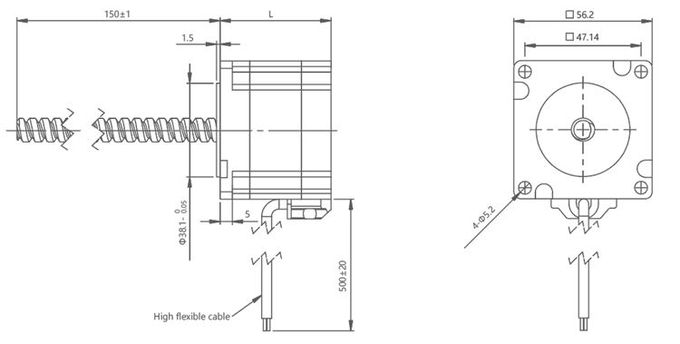
Nā memo:
Hiki ke hoʻopilikino ʻia ka lōʻihi o ka wili alakaʻi
Hiki ke hana ʻia ka mīkini hana maʻamau ma ka hopena o ka wili alakaʻi
E ʻoluʻolu e leka uila mai iā mākou no nā kikoʻī hou aku o ka wili pōpō.
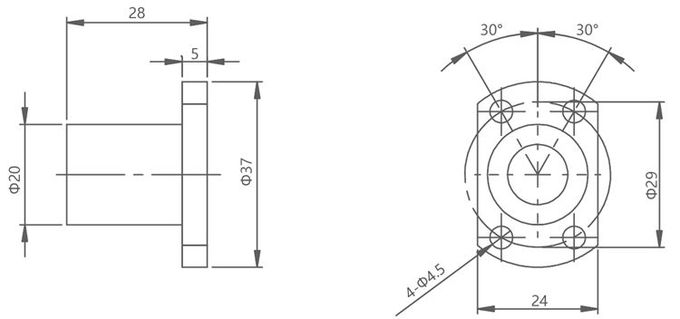
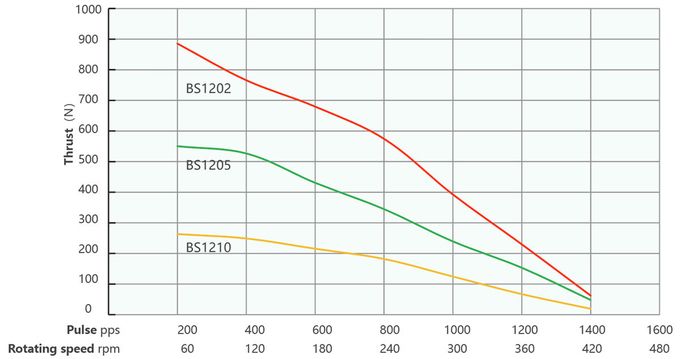
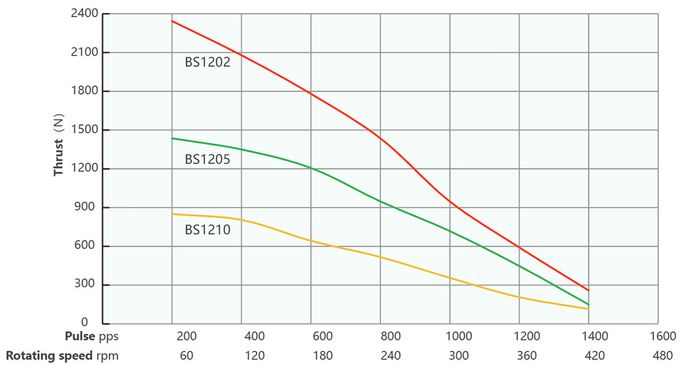
ʻO ke kaha kiʻi hoʻolālā o ka nati pōpō 1202 VSM57BSHSMBa:
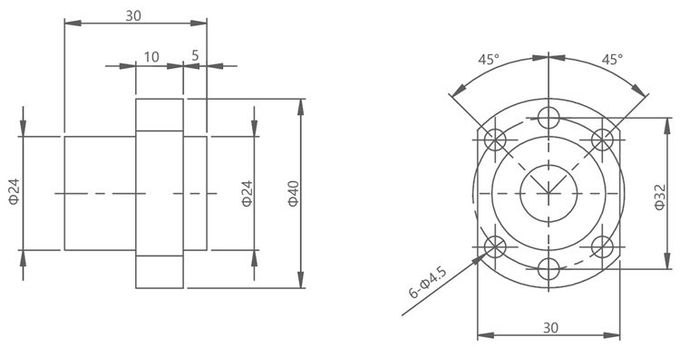
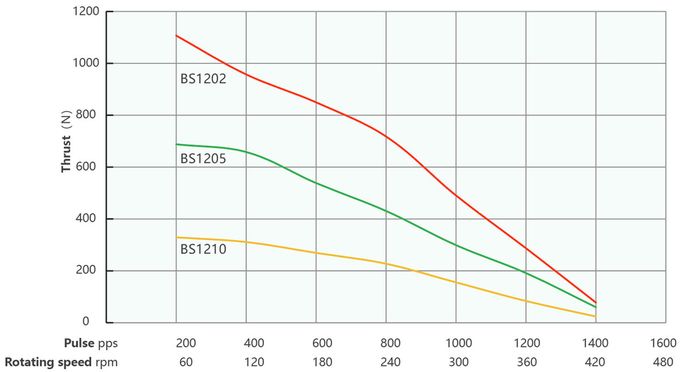
ʻO ke kaha kiʻi hoʻolālā o ka nati pōpō 1205 VSM57BSHSMBa:
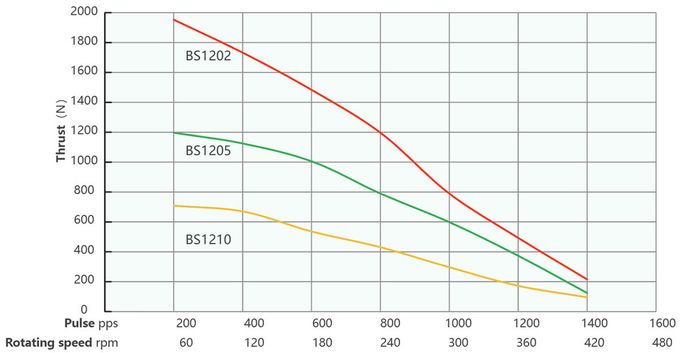
ʻO ke kaha kiʻi hoʻolālā o ka nati pōpō 1210:
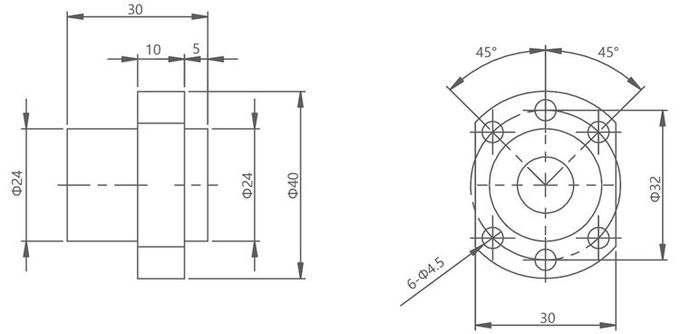
ʻO ke kaha kiʻi hoʻolālā o ka nati pōpō 1210:
Ka wikiwiki a me ke piʻo hoʻokuke
57 moʻo 45mm ka lōʻihi o ka motika bipolar Chopper drive
100% alapine pulse o kēia manawa a me ke piʻo hoʻokuke
57 moʻo 55mm ka lōʻihi o ka motika bipolar Chopper drive
100% alapine pulse o kēia manawa a me ke piʻo hoʻokuke
| Ke kēpau (mm) | Ka wikiwiki laina (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Kūlana hoʻāʻo:ʻO ka hoʻokele chopper, ʻaʻohe ramping, hapalua micro-stepping, voltage drive 40V
57 moʻo 65mm ka lōʻihi o ka motika bipolar Chopper drive
100% alapine pulse o kēia manawa a me ke piʻo hoʻokuke
57 moʻo 75mm ka lōʻihi o ka motika bipolar Chopper drive
100% alapine pulse o kēia manawa a me ke piʻo hoʻokuke
| Ke kēpau (mm) | Ka wikiwiki laina (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Kūlana hoʻāʻo:ʻO ka hoʻokele chopper, ʻaʻohe ramping, hapalua micro-stepping, voltage drive 40V
Nā wahi o ka noi:
Nā lako hana hōʻoia lapaʻau:Hiki ke hoʻohana ʻia nā motika stepper wili pōpō hybrid 57mm i nā lako hana diagnostic lapaʻau e like me nā scanner kiʻi, nā scanner CT, nā lako X-ray, nā mea hana MRI a pēlā aku. ʻO kā lākou kaohi kūlana kiʻekiʻe a me ke kūpaʻa e hiki ai ke neʻe pololei a me ke kau ʻana i ka wā o ka loaʻa ʻana a me ka hana ʻana i nā kiʻi lapaʻau.
Nā Mea Hana ʻEpekema Ola:I ka noiʻi ʻepekema ola a me ka hoʻokolohua ʻana, hoʻohana ʻia nā motika stepper wili pōleʻa hybrid 57mm i nā ʻōnaehana lawelawe wai automated, nā lako nānā throughput kiʻekiʻe, nā mea hana moʻomeheu cell, nā mea hoʻonohonoho gene, a me nā mea hou aku. ʻO ke kiʻekiʻe o ka pololei a me ka hilinaʻi o kēia mau motika e hiki ai iā lākou ke hoʻokō i ke koi no ka neʻe pololei a me ka kaohi kūlana i nā lako hoʻokolohua.
Nā Lopako:Hoʻohana nui ʻia nā motika stepper wili pōpō hybrid 57mm i ka robotics no nā hoʻokele hui, ka neʻe ʻana o ka lima robotic, a me ke kūlana pololei. Hōʻike ʻia kēia mau motika e ka torque kiʻekiʻe, ka hoʻonā kiʻekiʻe a me ka walaʻau haʻahaʻa e hoʻokō i ke koi no ka neʻe pololei a me ka kaohi i nā noi robotics.
Nā lako laser:Hiki ke hoʻohana ʻia nā motika stepper wili pōpō hybrid 57mm i nā lako laser no nā hana e like me ka hoʻoponopono ʻana i ka noʻonoʻo, ka papa panning, a me ka kaohi ala optical. ʻO kona kaohi kūlana kiʻekiʻe a me ke kūpaʻa e hiki ai iā ia ke hoʻokō i ka noʻonoʻo pololei a me ke kūlana o ke kukuna laser.
Nā Mea Hana Loiloi:Ma nā ʻano mea hana loiloi hoʻokolohua like ʻole, hiki ke hoʻohana ʻia nā motika stepper wili pōleʻa hybrid 57mm i ka hana ʻakomi laʻana, nā ʻōnaehana hānai laʻana, nā chromatograph wai, nā chromatograph kinoea, a pēlā aku. ʻO ka neʻe pololei kiʻekiʻe a me ka hana paʻa o kēia mau motika he mea nui ia i ka hoʻomaikaʻi ʻana i ka pololei a me ka pono o ka loiloi hoʻokolohua.
Nā lako hana semiconductor a me nā mea hana uila:Hoʻohana ʻia nā mīkini stepper wili pōpō hybrid 57mm no ke kau pololei ʻana a me ka kaohi automation i nā lako hana semiconductor a me nā lako hana uila. No ka laʻana, hiki ke hoʻohana ʻia i nā lako hoʻāʻo chip semiconductor, nā mīkini hoʻopili, ka ʻenehana hoʻopaʻa ʻana i ka ʻili, ka hana ʻana o ka papa kaapuni paʻi a me nā wahi ʻē aʻe e hāʻawi i ka kaohi neʻe wikiwiki, pololei kiʻekiʻe a hilinaʻi hoʻi.
Nā lako hana automation maʻamau ʻole a me nā ʻano lako hana automation like ʻole:He kūpono nā mīkini stepper wili pōpō hybrid 57mm no kahi ākea o nā lako automation maʻamau ʻole a me nā laina hana automated. Hiki ke hoʻohana ʻia i nā lako hoʻonoho, nā ʻōnaehana hōʻuluʻulu aunoa, nā lako hoʻopili, nā mīkini paʻi, nā lako lole, a pēlā aku. Hāʻawi lākou i ka mana kūlana pololei a me ka hana neʻe hilinaʻi e hoʻokō i nā pono automation ma nā ʻano like ʻole.
Pōmaikaʻi
Ka lakio Torque-to-Inertia kiʻekiʻe:He kiʻekiʻe ka lakio torque-to-inertia o nā mīkini stepper wili poepoe hybrid, ʻo ia hoʻi hiki iā lākou ke hāʻawi i ka hopena torque koʻikoʻi e pili ana i ko lākou nui a me ke kaumaha. ʻO kēia ka mea kūpono iā lākou no nā noi e pono ai ka torque kiʻekiʻe i kahi ʻano compact, e like me ka robotics, nā mīkini CNC, a me nā ʻōnaehana automation.
Ka wikiwiki kiʻekiʻe a me ka hoʻēmi ʻana:Hiki i kēia mau motika ke hoʻolalelale a hoʻēmi i ka wikiwiki, e ʻae ana i nā neʻe wikiwiki a pololei. ʻO ka inertia haʻahaʻa o ka rotor a me ka hoʻopuka torque kiʻekiʻe e hiki ai i ka motika ke pane koke i nā hōʻailona kaohi, e hopena ana i nā manawa hoʻomaka-hoʻōki wikiwiki a hoʻomaikaʻi i ka hana holoʻokoʻa o ka ʻōnaehana.
Ka Heʻe ʻana o ka Microstepping Laumania:He kūpono loa nā motika stepper wili pōpō hybrid no ka hana microstepping, kahi e ʻae ai i ka hoʻonā maikaʻi a me ka kaohi neʻe ʻana. Hoʻokaʻawale ka Microstepping i kēlā me kēia ʻanuʻu piha i nā ʻanuʻu liʻiliʻi, e hōʻemi ana i ka nui o ke ʻanuʻu a hoʻemi i ka haʻalulu, ka walaʻau, a me nā hopena resonance. He mea pono loa kēia hiʻohiʻona i nā noi e pono ai ka neʻe mālie a pololei, e like me nā mīkini paʻi 3D a me nā ʻōnaehana hoʻonohonoho linear.
Hoʻihoʻi haʻahaʻa:Kōkua ka mīkini wili pōpō i loko o kēia mau motika i ka hoʻēmi ʻana i ka backlash, ʻo ia ka pāʻani a i ʻole ka ʻokoʻa ma waena o ka rotor a me ka ukana. Hōʻoia ka backlash haʻahaʻa i ke kūlana pololei a me ka hana hou ʻana, no ka mea, he liʻiliʻi ka neʻe nalowale i ka wā e hoʻololi ai i nā kuhikuhi a i ʻole ka neʻe hoʻohuli. He mea koʻikoʻi kēia no nā noi e pono ai ke kūlana pololei a hiki ke hana hou ʻia, e like me nā mīkini pick-and-place a me nā ʻōnaehana optical.
Pane Hoʻoikaika Kiʻekiʻe:ʻO ka hui pū ʻana o ka motika stepper hybrid a me ka mīkini wili pōpō e ʻae ai i ka pane ikaika kiʻekiʻe, ʻo ia hoʻi, hiki i ka motika ke hahai koke a pololei i nā loli i ka hōʻailona kaohi. He mea nui kēia pane ʻana no nā noi e pili ana i nā loli wikiwiki i ka wikiwiki, ke kuhikuhi, a i ʻole ke kūlana, e like me ka mīkini wikiwiki a me nā ʻōnaehana kaohi neʻe ikaika.
Ka Pono Wela:Ua hoʻolālā ʻia nā motika stepper wili poepoe hybrid e loaʻa ka pono wela maikaʻi, e ʻae ana i ka hoʻopuehu wela maikaʻi i ka wā o ka hana. Kōkua kēia i ka pale ʻana i ka wela nui a hōʻoia i ka hana paʻa o ka motika, ʻoiai i ka wā hoʻohana lōʻihi a i ʻole i nā noi koi.
Hoʻonā Kūpono:Hāʻawi nā mīkini stepper wili pōpō hybrid i kahi hopena kūpono no nā noi e pono ai ka pololei kiʻekiʻe a me ka torque. Ke hoʻohālikelike ʻia me nā ʻōnaehana mīkini servo paʻakikī a pipiʻi hoʻi, hāʻawi nā mīkini stepper hybrid i kahi kaulike ma waena o ka hana, ke kumukūʻai, a me ka maʻalahi o ka hoʻohana. He koho makemake pinepine lākou no nā noi kahi he kumu nui ke kumukūʻai, me ka ʻole o ka hoʻopilikia ʻana i ka maikaʻi a me ka hana.
Nā Koina Koho ʻana o ka Motika:
►ʻAoʻao neʻe/kau ʻana
►Nā Koina Hoʻouka
►Nā Koina Hahau
►Nā koi mīkini hoʻopau
►Nā Koi Pololei
►Nā Koina Manaʻo no ka Encoder
►Nā Koina Hoʻoponopono Lima
►Nā Koina Kaiapuni
Hale hana hana






