Paʻa-loopnā kaʻa stepperua hoʻololi i ka lakio hoʻokō-a-uku i nā noi hoʻomalu neʻe. ʻO ka kūleʻa o nā motika holomua paʻa paʻa VIC ua wehe pū i ka hiki ke hoʻololi i nā mīkini servo kūʻai me nā kumu kūʻai haʻahaʻa.nā kaʻa stepper.Ma ka hoʻonui nui ʻana o nā noi ʻoihana ʻenehana kiʻekiʻe, ke hoʻololi nei nā holomua ʻenehana i ka ratio hana-i-uku ma waena o nā kaʻa stepper a me nā kaʻa servo.
ʻO nā kaʻa stepper me nā ʻenekini servo
Wahi a ka naʻauao maʻamau, ʻoi aku ka maikaʻi o nā ʻōnaehana hoʻokele servo i nā noi kahi e koi ʻia ai ka wikiwiki ma mua o 800 RPM a me ka pane kiʻekiʻe. ʻOi aku ka maikaʻi o nā kaʻa stepper no nā noi me nā haʻahaʻa haʻahaʻa, haʻahaʻa haʻahaʻa i ka wikiwiki a me ke kiʻekiʻe paʻa torque.
No laila he aha ke kumu o kēia naʻauao maʻamau e pili ana i nā kaʻa stepper a me nā kaʻa servo? E noʻonoʻo kākou ma lalo nei.
1. ʻO ka maʻalahi a me ke kumukūʻai
ʻAʻole ʻoi aku ka maʻalahi o nā kaʻa stepper ma mua o nā kaʻa servo, ʻoi aku ka maʻalahi o ka hana a mālama. Paʻa nā kaʻa stepper i ke kū a paʻa i ko lākou kūlana (ʻoiai me nā haʻahaʻa ikaika). Eia nō naʻe, inā koi ʻia ka hana kiʻekiʻe no kekahi mau noi, pono e hoʻohana ʻia nā mīkini servo ʻoi aku ka pipiʻi a paʻakikī.
2. Kapili
Nā motika steppere hoʻololi i ke ʻano heʻe, me ka hoʻohana ʻana i nā coils magnetic e huki mālie i kahi magnet mai kahi kūlana a i kekahi. No ka hoʻoneʻe ʻana i ke kaʻa 100 mau kūlana i kēlā me kēia ʻaoʻao, pono ke kaapuni i 100 mau hana ʻanuʻu e hana ʻia ma ke kaʻa. Hoʻohana nā kaʻa stepper i nā pulses e hoʻokō i nā neʻe hoʻonui, e ʻae i ke kūlana pololei me ka ʻole o ka hoʻohana ʻana i nā mea ʻike manaʻo.
ʻOkoʻa ke ʻano o ka neʻe ʻana o ka mīkini servo. Hoʻopili ia i kahi mea ʻike kūlana - ʻo ia hoʻi he encoder - i ka rotor magnetic a ʻike mau i ke kūlana pololei o ka kaʻa. Mālama ka servo i ka ʻokoʻa ma waena o ke kūlana maoli o ke kaʻa a me ke kūlana i kauoha ʻia a hoʻoponopono i kēia manawa. Mālama kēia ʻōnaehana pani pani i ke kaʻa ma ke ʻano o ka neʻe ʻana.

3. Ka māmā a me ka torque
ʻO ka ʻokoʻa o ka hana ma waena o nā kaʻa stepper a me nā servo e pili ana i kā lākou ʻano hoʻolālā hoʻolālā ʻokoʻa.Nā motika stepperʻoi aku ka nui o nā pole ma mua o nā servomotors, no laila, ʻo ka hoʻololi piha ʻana o kahi kaʻa stepper e koi ai i nā hoʻololi hou ʻana o kēia manawa, e hopena i ka hāʻule wikiwiki ʻana o ka torque i ka piʻi ʻana o ka wikiwiki. Eia kekahi, inā hiki i ka torque kiʻekiʻe loa, hiki i ka stepper motor ke nalowale i kāna hana hoʻonohonoho wikiwiki. No kēia mau kumu, ʻo nā mīkini servo ka hopena i makemake ʻia i ka hapa nui o nā noi kiʻekiʻe. Ma ka hoʻohālikelike ʻana, ʻoi aku ka maikaʻi o ka nui o nā pou o kahi kaʻa stepper i nā wikiwiki haʻahaʻa, ke loaʻa i ka kaʻa stepper ka lanakila torque ma luna o kahi kaʻa servo o ka nui like.
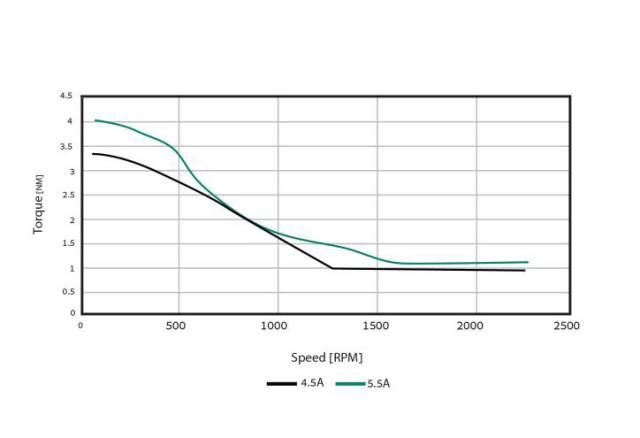
I ka piʻi ʻana o ka wikiwiki, e emi ana ka torque o ke kaʻa stepper
4. Hoʻonohonoho
Aia nā ʻokoʻa koʻikoʻi ma waena o nā kaʻa stepper a me nā kaʻa servo i nā noi kahi e ʻike pono ai ke kūlana pololei o ka mīkini i nā manawa āpau. Ma nā noi hoʻoneʻe puka hāmama i hoʻomalu ʻia e nā kaʻa stepper, manaʻo ka ʻōnaehana hoʻokele i nā manawa a pau o ke ʻano o ka neʻe. Eia nō naʻe, ma hope o ka loaʻa ʻana o kahi pilikia, e like me ke kaʻa i hoʻopaʻa ʻia ma muli o kahi ʻāpana paʻa, ʻaʻole hiki i ka mea hoʻoponopono ke ʻike i ke kūlana maoli o ka mīkini, hiki ke alakaʻi i ka nalowale o ke kūlana. Loaʻa i ka ʻōnaehana pani pani o ka mīkini servo ponoʻī: inā paʻa ʻia e kahi mea, e ʻike koke ia. E pau ka hana ʻana o ka mīkini a ʻaʻole loa e pau i ke kūlana.
5. Ka wela a me ka ikehu
Hoʻohana nā kaʻa stepper open-loop i ka manawa paʻa a hāʻawi i ka wela nui. Hāʻawi ka mana paʻa-loop i kēia manawa i koi ʻia no ka loop loop a no laila e pale i ka pilikia o ka hoʻomehana kaʻa.
Hōʻuluʻulu hoʻohālikelike
ʻOi aku ka maikaʻi o nā ʻōnaehana hoʻomalu Servo i nā noi wikiwiki e pili ana i nā loli hoʻoikaika ikaika, e like me nā lima robotic. ʻO nā ʻōnaehana mana stepper, ma kekahi ʻaoʻao, ʻoi aku ka maikaʻi no nā noi e koi ana i ka wikiwiki haʻahaʻa a me ka torque paʻa kiʻekiʻe, e like me nā mīkini paʻi 3D, conveyors, sub axes etc. Pono nā ʻōnaehana hoʻokele e pono e hoʻohana pono i nā ʻano o nā kaʻa servo e hōʻoiaʻiʻo i kēia mau mīkini kumu kūʻai kiʻekiʻe i ko lākou kaumaha i ke gula.
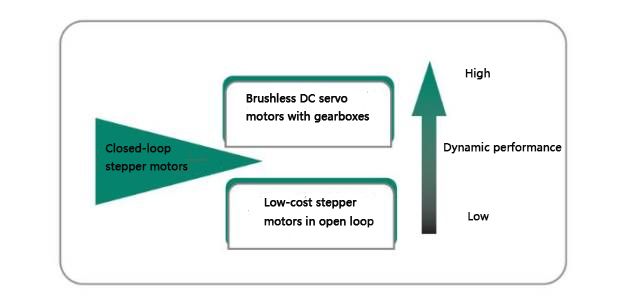
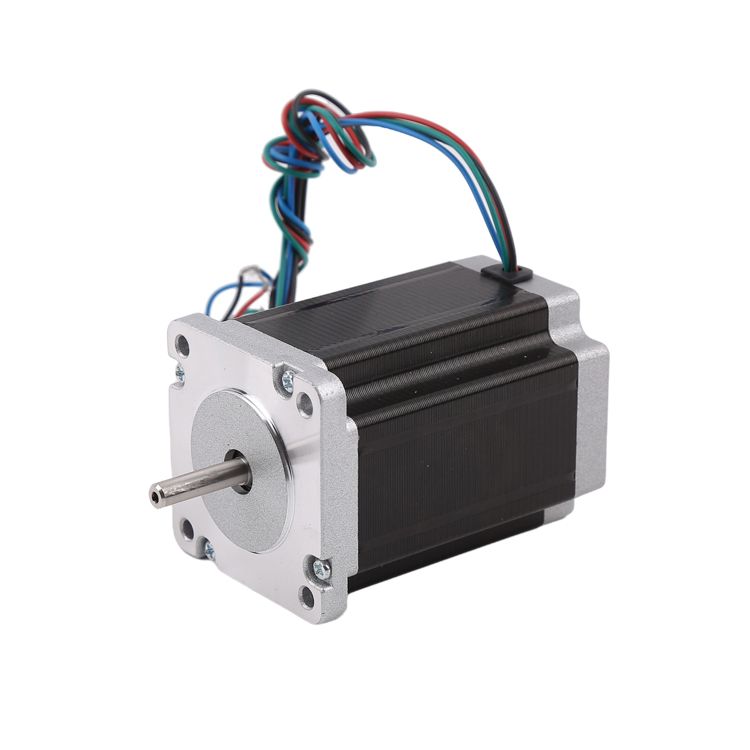
ʻO nā motika stepper me ka mana pani pani
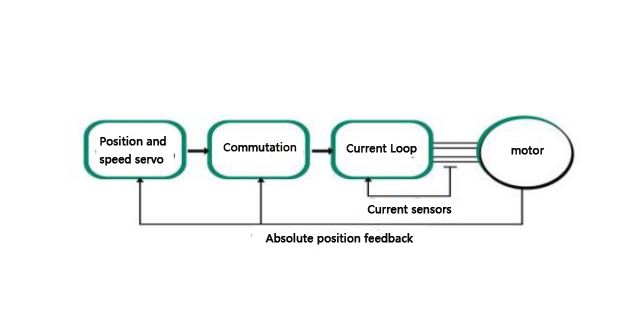
ʻO ke kaʻa stepper me ka mana uila i hoʻohui ʻia e like me ka mīkini DC brushless ʻelua-phase a hiki ke hana i ka mana loop position, control loop speed, control DQ, a me nā algorithms ʻē aʻe. Hoʻohana ʻia kahi encoder holoʻokoʻa hoʻokahi no ka hoʻololi ʻana i ka loop loop, no laila e hōʻoia i ka torque maikaʻi loa i kēlā me kēia wikiwiki.
Haʻahaʻa ka hoʻohana ikehu a mālama i ka maʻalili
ʻO nā kaʻa VIC stepper he ikaika loa ka ikehu. ʻAʻole like me nā kaʻa stepper open-loop, e hana mau ana ma ke kauoha piha o kēia manawa a ke kumu i nā pilikia wela a me ka walaʻau, hoʻololi ke ʻano o kēia manawa e like me nā kūlana maoli o ka neʻe, no ka laʻana i ka wā wikiwiki a me ka deceleration. E like me nā servos, ʻo ka mea i hoʻopau ʻia e kēia mau kaʻa stepper i kēlā me kēia manawa e like me ka torque maoli i koi ʻia. No ka mea ʻoi aku ka maikaʻi o ka holo ʻana o ka mīkini a me ka papa hoʻokele uila hoʻohui ʻia, hiki i nā motika stepper VIC ke hoʻokō i nā torque kiʻekiʻe kiʻekiʻe e like me nā kaʻa servo.
ʻOiai ma nā wikiwiki kiʻekiʻe, pono nā kaʻa VIC stepper i ka liʻiliʻi o kēia manawa
Ke alakaʻi ʻia e nā holomua i ka ʻenehana pani pani, hiki i nā kaʻa stepper ke komo i ka hana kiʻekiʻe, nā noi wikiwiki kiʻekiʻe i pili wale i nā kaʻa servo.
Nā motika stepper me ka ʻenehana pani pani
He aha inā hiki ke hoʻohana ʻia nā pono o ka ʻenehana servo pani pani i nā kaʻa stepper?
Hiki iā mākou ke hoʻokō i ka hana hoʻohālikelike i nā kaʻa servo ʻoiai e ʻike mau ana i nā kumukūʻai o nā kaʻa stepper?
Ma ka hoʻohui ʻana i ka ʻenehana hoʻomalu pani pani, e lilo ka kaʻa stepper i huahana piha me nā pono o nā kaʻa servo a me nā stepper ma ke kumu kūʻai haʻahaʻa. No ka hāʻawi ʻana o nā mīkini stepper pani pani i nā hoʻomaikaʻi koʻikoʻi i ka hana a me ka ikaika o ka ikehu, hiki iā lākou ke hoʻololi i nā motika servo ʻoi aku ka nui o ka nui o nā noi kiʻekiʻe.
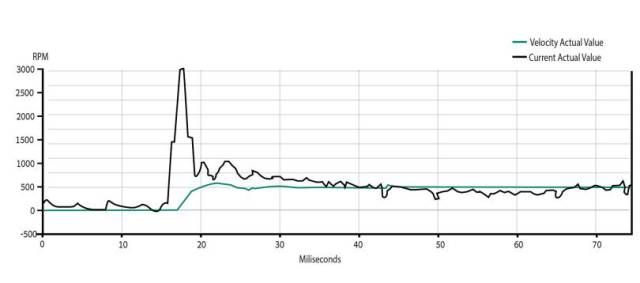
ʻO kēia ka laʻana o kahi kaʻa stepper hoʻohui VIC me ka mana pani pani i hoʻopili ʻia e wehewehe i ka hana a me nā pono a me nā hemahema o nā kaʻa stepper me ka ʻenehana pani-loop.
Kūlike pono nā koi hana
I mea e hōʻoia ai i ka torque lawa e lanakila ai i nā haunaele a pale aku i nā ʻanuʻu nalowale, pono e hōʻoia ʻia nā motika stepper open-loop e hōʻoia i ka torque ma kahi o 40% kiʻekiʻe ma mua o ka waiwai i koi ʻia e ka noi. ʻAʻole loaʻa kēia pilikia i nā motika stepper pani pani. Ke kū nei kēia mau kaʻa stepper ma muli o ke kaumaha nui, e hoʻomau lākou i ka paʻa ʻana i ka ukana me ka nalowale ʻole o ka torque. E hoʻomau lākou i ka hana ma hope o ka wehe ʻana i ke kūlana overload. Hiki ke hōʻoia ʻia ka torque kiʻekiʻe i kēlā me kēia wikiwiki a ʻo ka mea ʻike kūlana e hōʻoiaʻiʻo ʻaʻole nalowale ka pae. No laila hiki ke kuhikuhi ʻia nā motika stepper paʻa e hoʻohālikelike pono i nā koi torque o ka noi kūpono me ka ʻole o ka pono o kahi margin 40%.
Me nā kaʻa stepper open-loop, paʻakikī ke hoʻokō i nā koi torque kiʻekiʻe ma muli o ka pilikia o ka nalowale ʻana. Ke hoʻohālikelike ʻia i nā kaʻa stepper maʻamau, hiki i nā mīkini stepper pani pani VIC ke hoʻokō i ka wikiwiki wikiwiki, haʻahaʻa haʻahaʻa haʻahaʻa a me ka haʻahaʻa haʻahaʻa. Hiki iā lākou ke hana ma nā bandwidth kiʻekiʻe aʻe a loaʻa ka hana maikaʻi loa.
ʻAʻohe kuhina
Hoʻohui ʻo Toda i ka papa hoʻokele kaʻa me ka kaʻa, e hōʻemi ana i ka nui o nā wili a me ka maʻalahi o ka hoʻokō hoʻokō. Me kēia lā, hiki iā ʻoe ke kūkulu i nā mīkini me ka ʻole o nā keʻena.
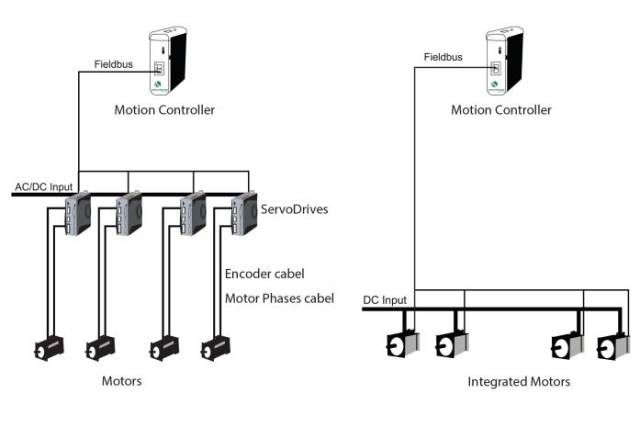
ʻO ka hoʻohui ʻana i nā mea uila me nā kaʻa stepper e hōʻemi i ka paʻakikī
Me ka ʻenehana paʻa-loop, hāʻawi nā mīkini stepper pani pani i nā mea hoʻohana i ka pololei a me ka maikaʻi, me ka hana o kahi kaʻa servo a me ke kumu kūʻai haʻahaʻa o kahi kaʻa stepper. Ke komo mālie nei nā kaʻa stepper kumu kūʻai haʻahaʻa i nā noi i ʻole e hoʻomalu ʻia e nā mīkini servo kumu kūʻai kiʻekiʻe.
Ka manawa hoʻouna: Apr-10-2023